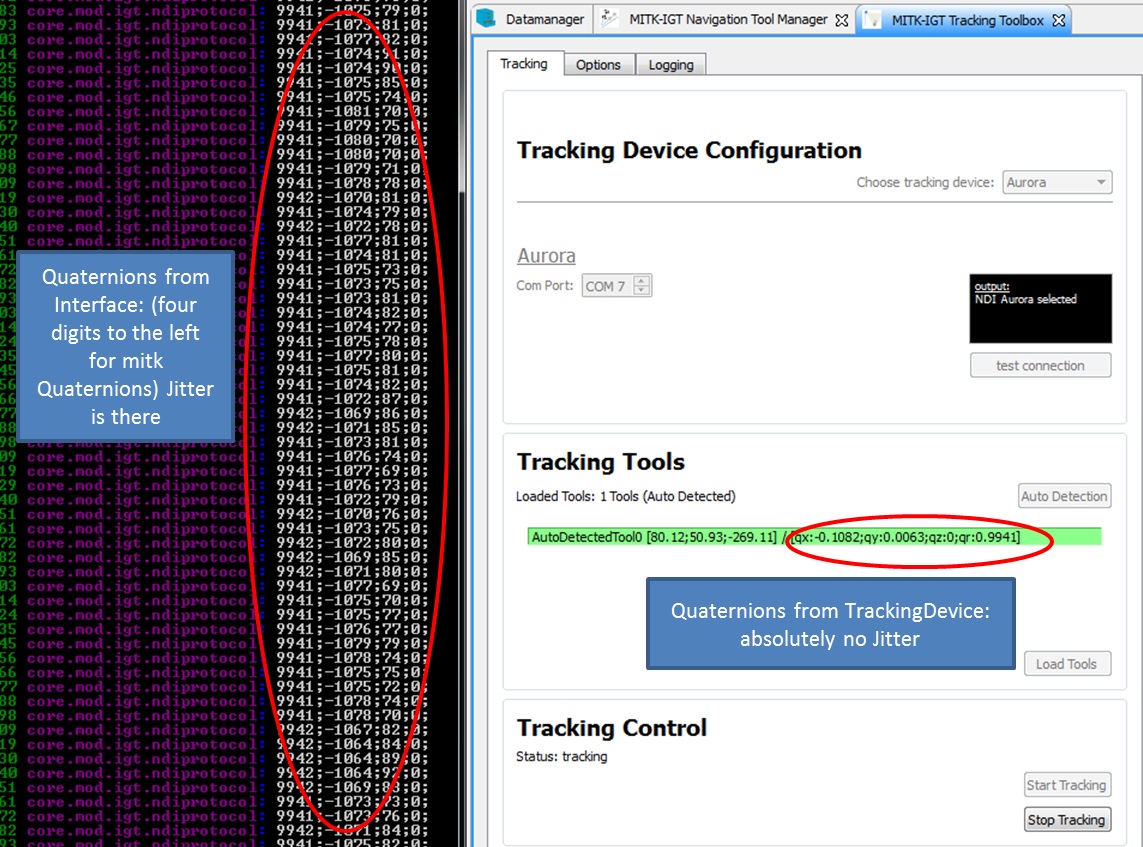
The NDITrackingDevice class is smoothing the orientation data (quaternions). If you have a look at the data which is recieved from the trackingdevice there is a small jitter. In the mitk quaternions there is absolutely no jitter left. I'll attach a screenshot where you can see the jitter in the raw data in comparison to the output of the TrackingToolbox PlugIn (where the jitter is not there any more).
I'll also create a branch where the NDI tracking device is modified to give out the raw data of the quaternions to the console.